ES
Tekniker
Sobre nosotros
Patronato
Entidades colaboradoras
Empresas de base tecnológica
BRTA
Acreditaciones
Trabajar en Tekniker
Dónde estamos
Sostenibilidad
Soluciones tecnológicas
Sistemas mecatrónicos
Mantenimiento industrial
Automatización y robótica industrial
Inspección y medida
Superficies multifuncionales
Dispositivos sensores
Áreas de investigación
Fabricación avanzada
Ingeniería de superficies
TICS
Ingeniería de producto
Sectores industriales
Aeronáutica y espacio
Agroalimentario
Automoción
Energías renovables
Industria de la ciencia
Infraestructuras
Máquina herramienta y fabricación
Salud
Hidrógeno verde
Comunicación
Noticias
Agenda
Logotipo
Plan de igualdad
Publicaciones científicas
Tesis
Invenciones
Buscar
Clientes/Colaboradores
Casos de éxito
Ley de Transparencia
Contacto
Clientes/Colaboradores
Casos de éxito
Ley de Transparencia
Contacto
ES
Buscar
Tekniker
Sobre nosotros
Patronato
Entidades colaboradoras
Empresas de base tecnológica
BRTA
Acreditaciones
Trabajar en Tekniker
Dónde estamos
Sostenibilidad
Soluciones tecnológicas
Sistemas mecatrónicos
Mantenimiento industrial
Automatización y robótica industrial
Inspección y medida
Superficies multifuncionales
Dispositivos sensores
Áreas de investigación
Fabricación avanzada
Ingeniería de superficies
TICS
Ingeniería de producto
Sectores industriales
Aeronáutica y espacio
Agroalimentario
Automoción
Energías renovables
Industria de la ciencia
Infraestructuras
Máquina herramienta y fabricación
Salud
Hidrógeno verde
Comunicación
Noticias
Agenda
Logotipo
Plan de igualdad
Publicaciones científicas
Tesis
Invenciones
Casos de Éxito
Inicio
Casos de Éxito
Comparte esta página
Comparte esta página en Twitter
Comparte esta página en GooglePlus
Comparte esta página en Facebook
Comparte esta página en LinkedIn
Comparte esta página por email
Filtrar por Áreas de investigación
Todo
Procesos de fabricación convencionales y no convencionales a escala macro, micro y nano
Tecnologías físico-químicas
Litografía de nanoimpresión
Analítica predictiva
Litografía
Metodología de desarrollo de producto
Mecatrónica e ingeniería de precisión
Materiales para energía
PVD
Adquisición y tratamiento de imagen
Ataque por plasma
Validación de tecnologías de medida electroquímicas
Gestión de la producción industrial
Tribología
Tecnología Sol-Gel
Localización y planificación de trayectorias
Bonding
Validación de tecnologías de medida ópticas
Integración de tecnologías heterogéneas
Control en uso de fluidos industriales
Electro Oxidación por Plasma
Interacción persona-máquina
Electrodeposición
Comportamiento en uso de materiales y superficies
Deposición directa con láser (laser cladding)
Regulación y control de sistemas
Micromecanizado convencional de ultraprecisión
MicroEDM y EDM
Texturizado láser
Actuadores y máquinas electromagnéticos
Microprocesado láser
Redes de sensores
Electrónica de bajo consumo, energy harvesting y seguridad
Microinyección
Sistemas ciber-físicos
Laser cladding o Laser Metal Deposition (LMD)
Soldadura de plásticos mediante tecnología láser
Tratamientos superficiales: térmicos y de acabado
Ultrasonidos
Mecanizado por arranque
Filtrar por Sector Industrial
Todo
Aeronáutica y espacio
Agroalimentario
Automoción
Energías renovables
Industria de la ciencia
Infraestructuras
Máquina herramienta y fabricación
Salud
Hidrógeno verde
Encoders lineales y angulares
Sistemas inteligentes para optimizar la evacuación de grandes infraestructuras
Internet of Things (IoT) para impulsar la eficiencia de la producción y bienestar animal en la cadena avícola
Plataforma móvil autónoma para detectar y controlar pestes en invernaderos
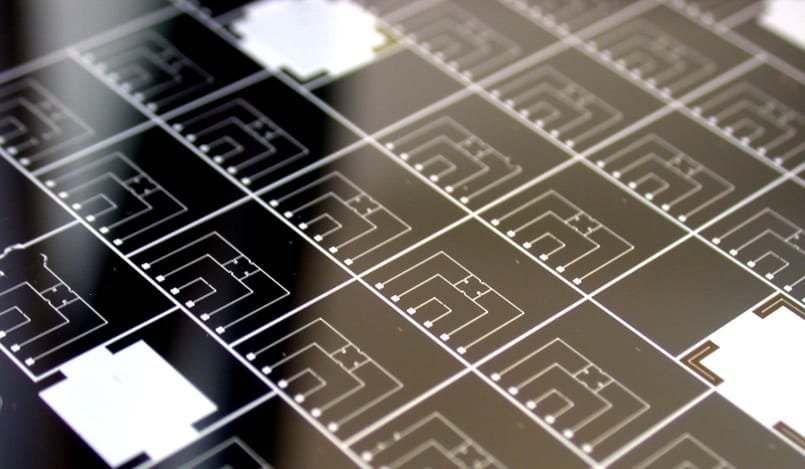
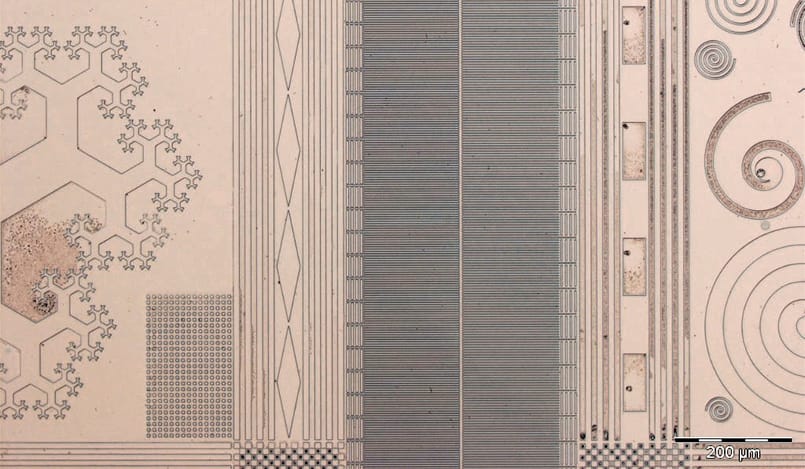
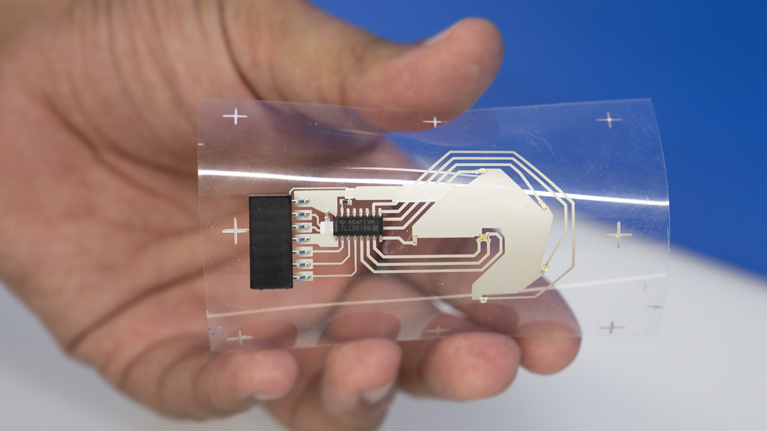
Desarrollo de electrónica flexible mediante ablación láser
Packaging biobasado para mejorar la conservación de los alimentos y reducir el desperdicio alimentario
Un innovador banco de pruebas de calibración nanométrica
Gestión de demanda energética en zonas residenciales
Mantenimiento predictivo de aerogeneradores
Desarrollo de la primera máquina de microperforado láser de alto rendimiento
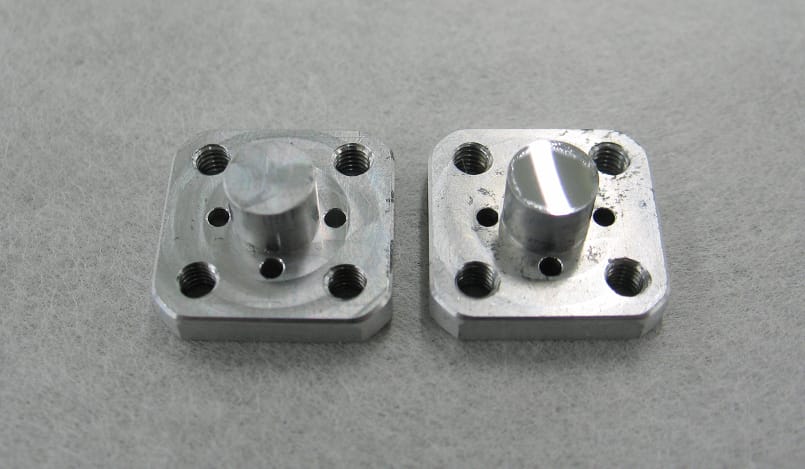
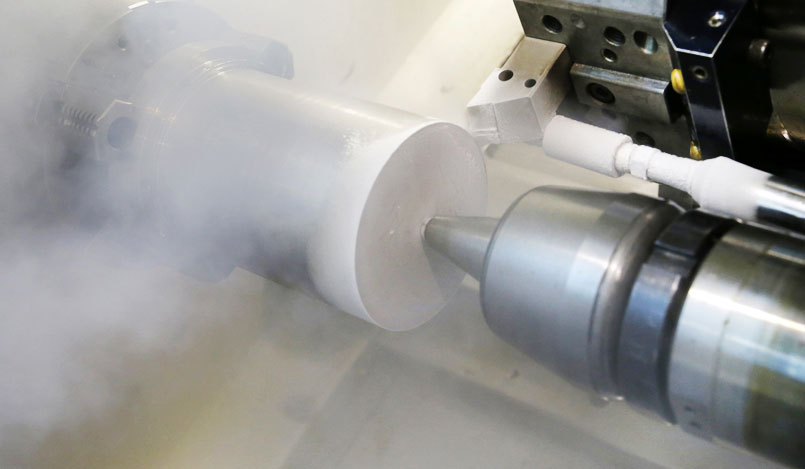
Mecanizado criogénico de acero 50CrMo4 (58 HRc)
Recubrimientos y soluciones alternativas al uso de materiales contaminantes
Centro de mecanizado y taladrado de palas de aerogenerador de gran tamaño
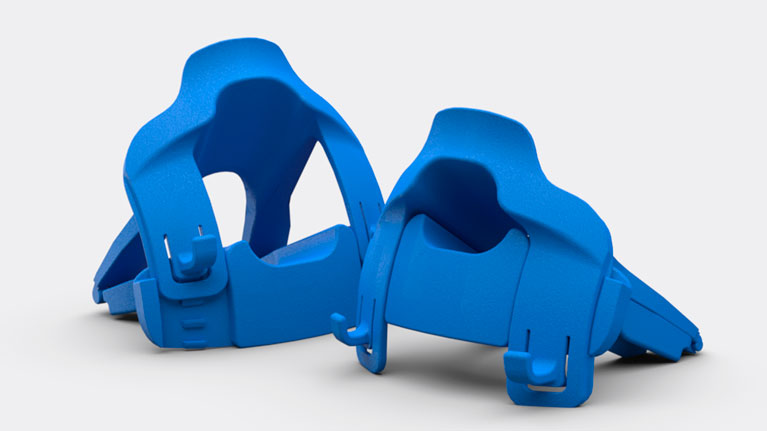
Desarrollo de un dispositivo protector bucal para uso clínico
Sensórica para monitorización de suciedad sobre superficies
Recubrimiento sostenible que mejora la capacidad de carga en componentes mecánicos
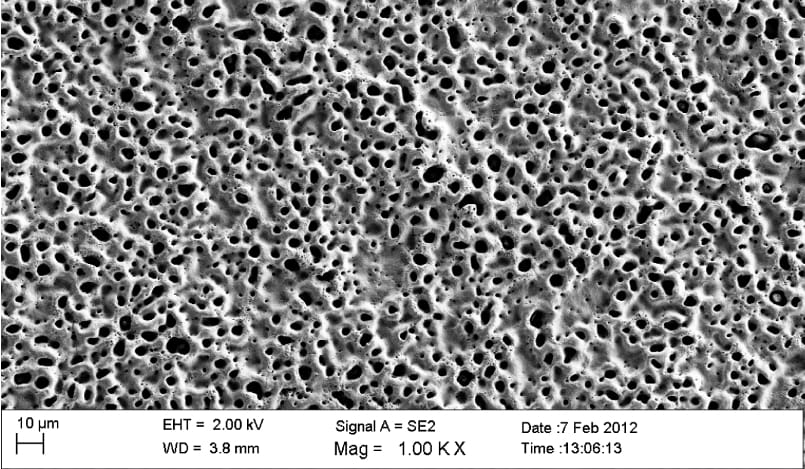
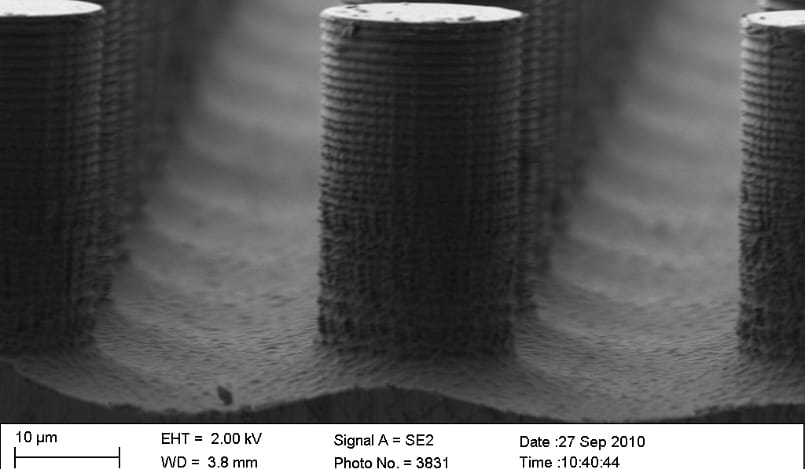
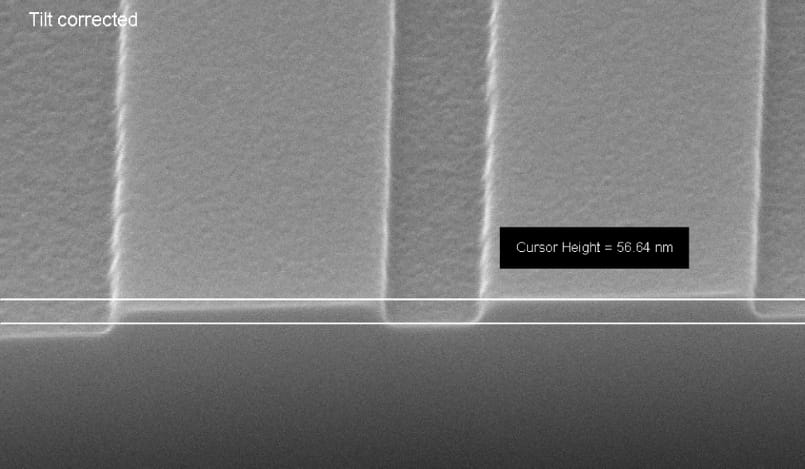
Ataques a escala nanométrica
Identificación y cuantificación de biomarcadores
Monitorización y predicción del estado de salud de las máquinas herramienta
Una novedosa solución para la calibración de heliostatos
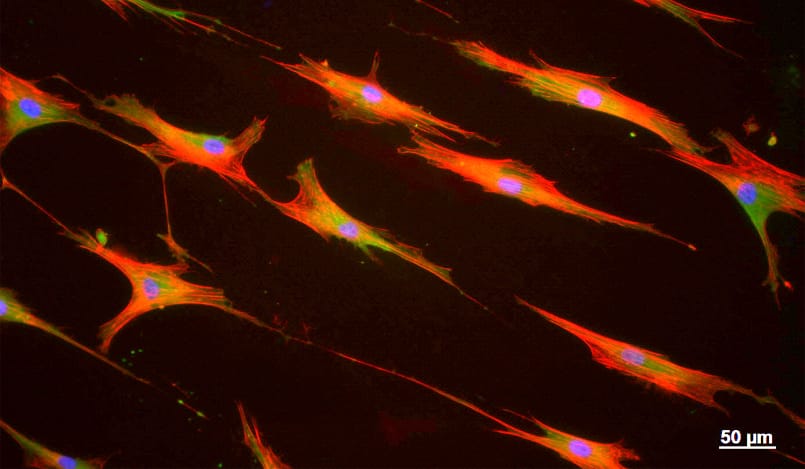
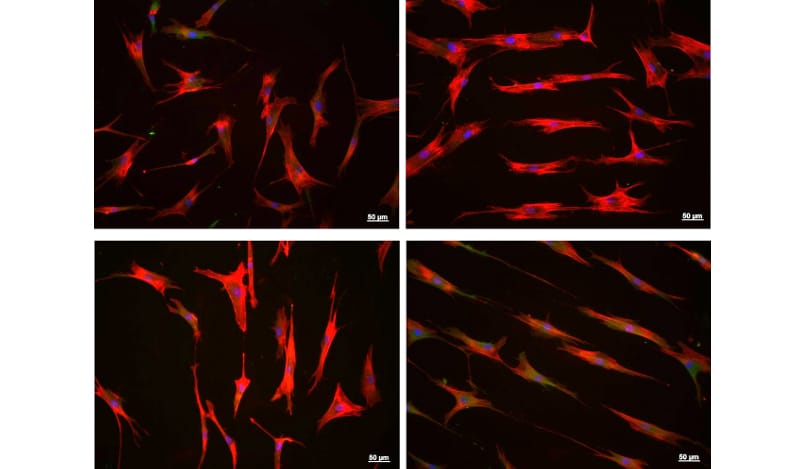
Estudio de la diferenciación y proliferación celular
Knowit, la plataforma de Inteligencia Competitiva de Tekniker en ULMA Handling Systems
Las pymes eibarresas incorporan la innovación
Mantenimiento predictivo para eólica
Robot manipulador de paletizado múltiple
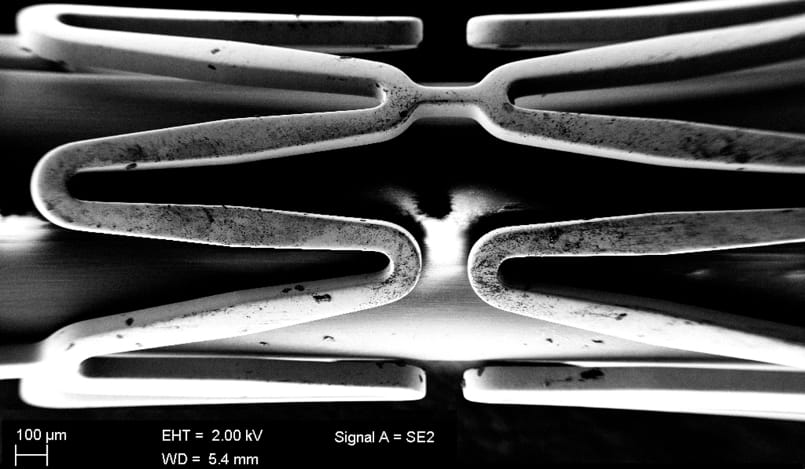
Desarrollo del patrón nacional de presiones para el Centro Español de Metrología (CEM)
Tubo en material biodegradable para la fabricación de stents
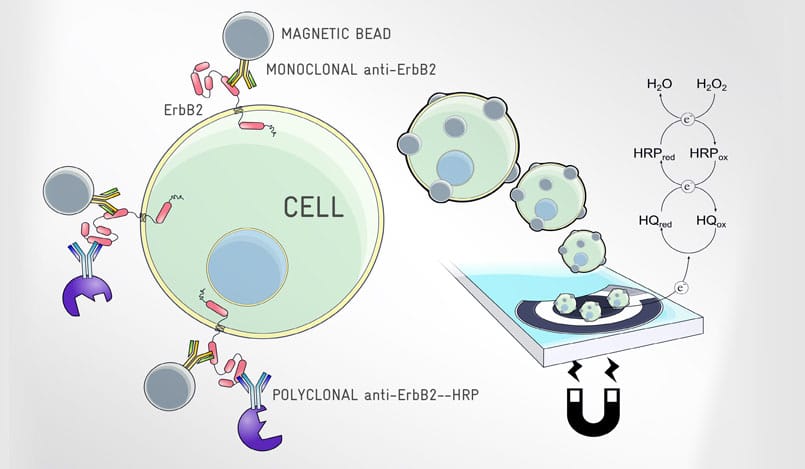
Detección de ErbB2 (biomarcador de cáncer de mama) directamente en células cancerígenas
Desarrollo de un coagulómetro portátil
Detección de niveles extremadamente bajos de biomarcadores de interés (TNFα)
Fallo en rodamiento de un motor eléctrico de ferrocarril
Recubrimiento de cerraduras y manillas
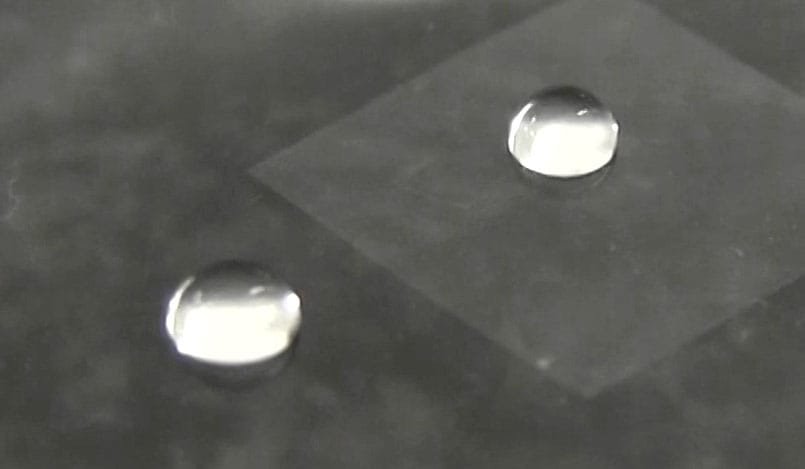
Superficies de aluminio con capacidad anti-hielo
Fallo en rodamiento de pala de aerogenerador
Recubrimiento selectivo para tubos de colectores cilindro-parabólicos
Limpieza de superficies metálicas y obras de arte mediante técnicas de limpieza con láser
Sensores inalámbricos autoalimentados para aplicaciones IoT
Selección de materiales y recubrimientos para juntas y ejes del tren de aterrizaje de aviones
Molde de precisión para boquillas pulverizadoras
Transformadores más ‘sanos’, gracias a un mantenimiento rediseñado
Máquina herramienta portable y autoportable
Patterning de proteínas y células
Sellado de un dispositivo con canales nanofluídicos
Pigmentos inteligentes que evitan la corrosión, repelen bacterias y regulan la temperatura
Sellos de níquel
Integración de procesos de innovación
Recubrimientos para implantes dentales
Fabricación de moldes para la producción de cartuchos microfluídicos desechables
Optimización del desgaste y acabado por fresado de materiales especiales
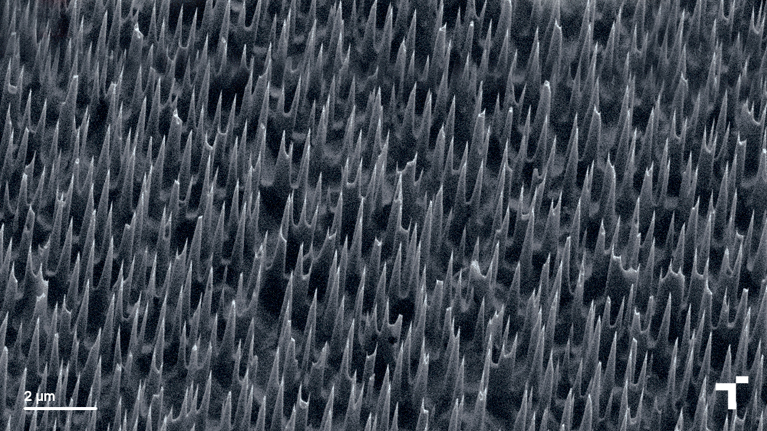
Superficies superhidrófobas y autolimpiables
Desarrollo de unidades de control para automoción
Sensor piezoresistivo
Sellos de níquel para litografía de nanoimpresión
Fabricación de moldes para la producción de lentes de muy reducido tamaño
Tornillos pertenecientes a una locomotora rotos en servicio
Recubrimientos antidesgaste y antirayado para suelas de plancha
Nuevos materiales aislantes con capacidad de almacenamiento térmico para su aplicación en edificación
Nuevos recubrimientos para alas de aviones
Reconocimiento del lenguaje de signos mediante el uso de sensores inerciales
Robots para la automatización de la industria del calzado
Monitorizado y mantenimiento proactivo en aerogeneradores
Desarrollo de una máquina de alta precisión para UNAMUNO
Desarrollo de nuevas herramientas y optimización de los parámetros de trabajo para el corte de tubos sin soldadura con alto contenido de Cr
Separador de gases
Robots para el mantenimiento e inspección de grandes instalaciones
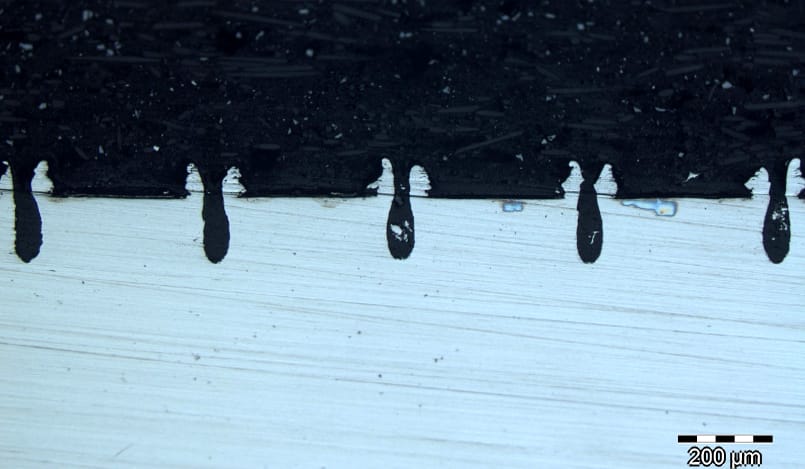
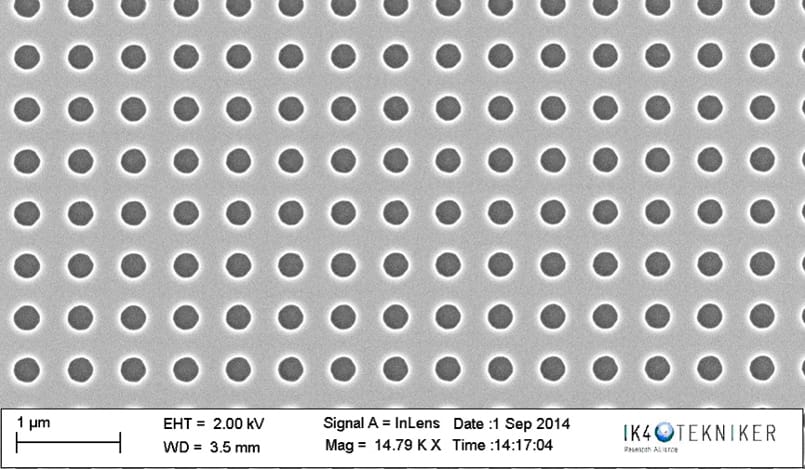
Proceso para ataque profundo de silicio
Sistema de unión de componentes de metal y plástico con tecnología láser
Comments
Para más información
Nombre *
Apellidos *
Empresa *
Email *
Consulta
Este sitio está protegido por reCAPTCHA y se aplican la
Política de privacidad
y los
Términos de servicio
de Google.
He leído y acepto el
aviso legal
de Tekniker*
Enviar

























.jpg)