
Segurtasuna, pertsona-robota elkarlaneko inguruneetan
Prodetect proiektuaren esparruan, Teknikerrek hurbileko detekzio-sistema bat garatu eta baliozkotu du, adimen artifizialean oinarritua.
Elkarlaneko robotak industriara iritsi dira. Robotak gero eta sartuago daude lan-eremu espezifikoetan, besteak beste paketeak egiten, piezak mihiztatzen edo ikuskapenean aritzen diren langileen ondoan.
Pertsonek eta robotek toki bera partekatzen duten inguruneetan, ezinbestekoa da pertsonek eta robotek elkarrekin lan egiteko eremuek nahiz sistema robotikoak berak pertsonentzako segurtasun-maila zorrotzak betetzen dituztela bermatzea.
Azken urteetan, pertsonak hauteman eta jarraitzeko sistemen gaitasunek hobera egin dute nabarmen. Sistema horiei esker, pertsonek behar dituzten gainbegirada eta segurtasuna lortzen dira, modu naturalean lortzen ere. Bada, testuinguru horretan burutu da Prodetect proiektua, COVR proiektu europarraren barruan, eta Basque Research and Technology Alliance (BRTA) aliantzako kidea den Teknikerrek ere parte hartu du.
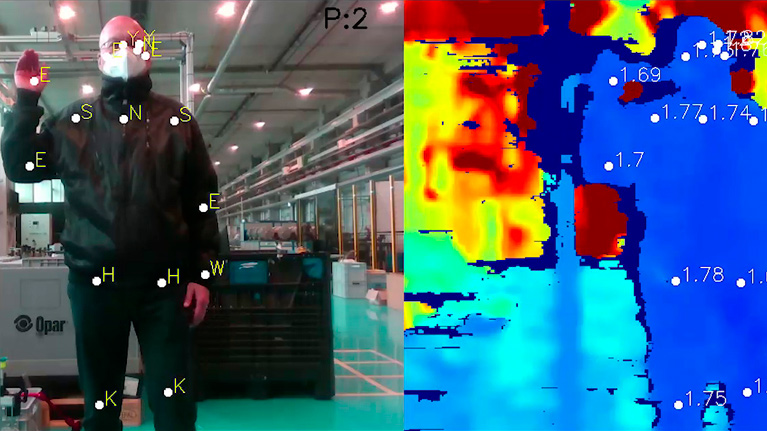
Zehazki, zentro teknologikoak hurbileko detekzio-sistema bat garatu du (aurrerantzean, PDS, ingeleseko siglengatik), robot baten eta robotak hurbil duen objektu baten arteko distantzia erlatiboa neurtzeko gai dena, ikuspen-sistema batek ematen duen puntu-hodei baten informaziotik abiatuta.
Era berean, Prodetect proiektuak, oro har, Teknikerrek garatu duen PDSaren bilakaerari begiratu dio, giza kontzientziadun hurbileko detekzio-sistema bat garatzeko (HA-PDS, ingeleseko siglengatik). Hala, gorputz-atalak detektatzeko eredu batean oinarritu dira HA-PDSaren garapenak, eta sistema hardware txiki batean integratu da.
Soluzioak eremu partekatu batean robotetik hurbil dauden pertsonak detektatzen ditu, eta robota gerarazten du, robotak eta pertsona horrek elkar ukitu aurretik.
HA-PDS sistema osoaren errendimendua ebaluatzeko, batetik, robotaren eta pertsonaren gorputz-atalen arteko distantziaren neurketa zehatza ote den baloratu behar izan da, eta, bestetik, gorputz-atalak adimen artifizialaren bidez detektatzeko gaitasuna baloratu da.
Probak hiru industria-agertoki garrantzitsutan baliozkotu dira. Lehenik, logistikaren sektorean garatu da, eta, horretarako, beso bakarreko robot kolaboratibo bat erabili da, picking-operazioak egiteko. Bigarrenik, fabrikazioan, bi besoko robot kolaboratibo bat erabili da, mihiztadura-operazioetarako. Azkenik, sektore aeronautikoan, manipulatzaile mugikor bat erabili da, osagai aeronautikoak ikuskatzeko.
Eskuratu diren emaitzez gain, proiektuak adimen artifiziala segurtasun-arloan erabil daitekeela erakutsi du, ikuspegi interesgarria emanez, eta gorputz-atalak detektatzeko sistema sendo bat garatzeko orduan aintzat hartu behar diren faktore giltzarrien inguruko jarraibide-sorta bat eskaini du.