
La seguridad en entornos colaborativos persona-robot
Tekniker desarrolla y valida, en el marco del proyecto Prodetect, un sistema de detección de proximidad basado en inteligencia artificial, capaz de medir la distancia entre un robot y las distintas partes del cuerpo de una persona para garantizar la seguridad de la misma.
La introducción de robots colaborativos en la industria es una realidad. Los robots están cada vez más integrados en espacios de trabajo específicos junto a personas en los que realizan tareas como el empaquetado, el ensamblaje de piezas o la inspección entre otras.
En un entorno donde las personas y los robots comparten el mismo espacio, es imprescindible garantizar que tanto el espacio en el que trabajan persona-robot como el propio sistema robótico cumplen con exigentes niveles de seguridad para las personas.
En los últimos años se ha producido una mejora significativa de las capacidades de los sistemas de detección y seguimiento de personas, una forma natural de proporcionar la supervisión y seguridad necesaria para las personas, y es en este contexto en el que se ha llevado a cabo el proyecto Prodetect, enmarcado dentro del proyecto europeo COVR, y en el que ha participado Tekniker, miembro de Basque Research and Technology Alliance (BRTA).
En concreto, el centro tecnológico ha desarrollado un sistema denominado sistema de detección de proximidad, en adelante PDS por sus siglas en inglés, capaz de medir la distancia relativa mínima entre un robot y un objeto en su proximidad, a partir de la información de la nube de puntos proporcionada por un sistema de visión.
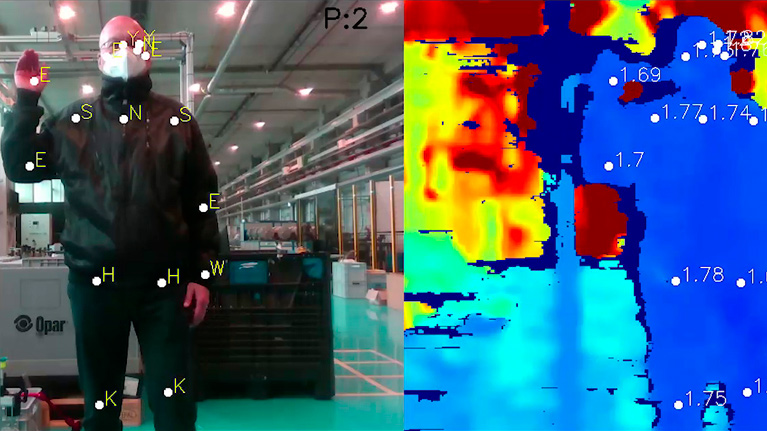
Asimismo, el proyecto Prodetect se ha centrado en su conjunto, en la evolución del PDS desarrollado por Tekniker en un sistema de detección de proximidad con conciencia humana (HA-PDS, por sus siglas en inglés). Los desarrollos del HA-PDS se han basado en un modelo de detección de partes del cuerpo, y el sistema se ha integrado en un hardware de dimensiones reducidas.
La solución detecta a las personas que se encuentran cerca del robot en un espacio compartido y detiene al robot antes de entrar en contacto.
La evaluación del rendimiento de todo el sistema HA-PDS ha requerido, por un lado, una valoración de la precisión en la medición de la distancia entre el robot y las partes del cuerpo de una persona y, por otro, la valoración de la capacidad de detectar las partes del cuerpo mediante inteligencia artificial.
Las pruebas se han validado en tres escenarios industriales de relevancia. En primer lugar, se ha desarrollado en el sector de la logística empleando un robot colaborativo de un solo brazo para operaciones de picking. En segundo lugar, en fabricación, empleando un robot colaborativo de doble brazo para operaciones de ensamblaje. Y, por último, en el sector aeronáutico, empleando en concreto, un manipulador móvil para inspección de componentes aeronáuticos.
Además de los resultados obtenidos, el proyecto también ofrece una interesante visión del uso de la inteligencia artificial como parte del componente de seguridad, con un conjunto de directrices sobre los factores clave que deben tenerse en cuenta para el desarrollo de un sistema robusto de detección de partes del cuerpo.