
Zama handiak manipulatzeko ezarpen robotizatu adimendunak
JATORMANek eta IK4-TEKNIKERek irtenbide bat garatu dute, modu malgu eta funtzioaniztunean manipulatzeko zama handiak, eta, aldi berean, zehaztasun eta automatizazio handiagoa lortzeko egin beharreko prozesuetan, ekoizpenaren kostuak eta denborak murrizteari begira.
Historikoki, eskuz gidatzen den makineriara (zubi-garabietara edo posizionatzaile finkoetara, adibidez) jo izan dute industria-enpresek, muntaketa, mekanizazio-, biltegi- edo translazio-prozesu ugaritan erabiltzen diren askotariko pieza astunak manipulatzeko.
Alabaina, egungo fabrikazio- eta muntaketa-prozesuek modu zehatz eta seguruan mugitu behar dituzte izugarri astunak diren piezak. Berriztagarrien edo automobilgintzaren sektoreek, esaterako, irtenbide teknologikoki aurreratuak behar dituzte zama astunak manipulatzeko, eta zamaren gainean hainbat eragiketa egitea ahalbidetu behar diete irtenbide horiek, itxarote-denborak murrizte eta instalazioan lekua aurrezte aldera.
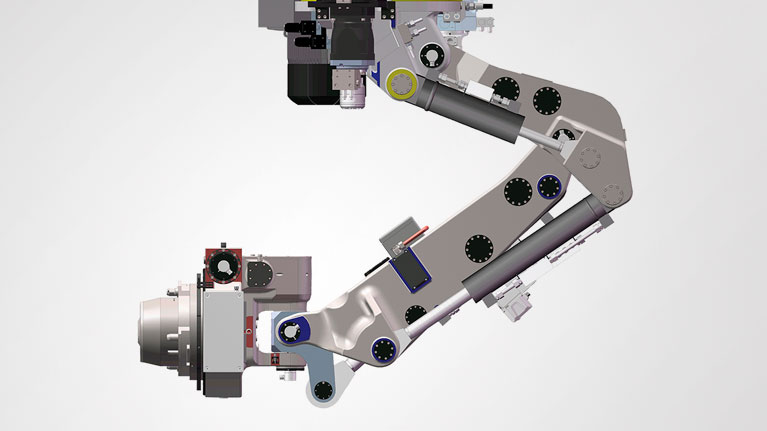
Erronka horri aurre egiteko, IK4-TEKNIKER gogoz aritu da JATORMAN ingeniaritzako irtenbideetan aditua den enpresarekin elkarlanean, ikusmen artifizialaz eta adimenaz hornitutako beso robotiko hidrauliko bat garatzeko xedez. JATORMANek patentatu du manipulatzaile hori, eta, zubi-garabia akoplatu ondoren, hiru tona arteko zamak modu zehatz eta seguruan manipulatzeko gai da.
Irtenbide hori garatzeko, lehenik, bideragarritasun tekniko eta ekonomikoaren azterketa egin da, guztiz pertsonalizatua, behar diren automatizazio-premiak aztertzeko.
Bigarrenik, simulazioaren, diseinu mekanikoaren eta neurri-ezarpenaren zati handi bat garatu da. Kontrol-ingeniaritzaren, diseinuaren eta irtenbidearen garapenaren ikuspuntutik begiratuta, erronka teknologikoa izan da hori. Beso robotikoak modu autonomoan kontrolatzen ditu eragingailuak, eta, horrela, ibilbide bat jarraitzen du horrek, zehaztutako manipulazio-estrategiaren arabera.
Haririk gabeko interfaze batean oinarritzen dira horren programazioa eta kontrola, eta CNC mintzaira estandarraren bidez egikaritzen dira. Koordenatuen araberako hainbat ibilbide edo "teaching" ahalbidetzen dituen sistema bat da hori, eta laneko hainbat eszenatokitara egokitzea errazten du. Bestalde, urrunetik manipulatzea ahalbidetzen du, ingurune oldarkor edo iristezinetan.
Hurrengo urratsean, irtenbide pilotua garatu zen, eta beso robotikoaren kontrol-sistema abiarazi zen, baita zubi-garabia abiarazi ere, besoarekin koordinatuta jarduten duenean.
Hiru tona arteko piezak zehaztasun milimetrikoz biratzeko, iraultzeko, lerrokatzeko, elikatzeko eta manipulatzeko dago programatuta beso robotikoa. Gainera, kakoak automatikoki trukatzea ahalbidetzen duen sistema dauka, mugitu behar den zamaren ezaugarriei egokitzeko horiek.
IK4-TEKNIKERek, bestalde, sentsore-sistema bat txertatu du beso robotikoan. Moldakortasun-automatizazioz hornitzen du sentsore-sistemak irtenbidea, eta pertsona-robot elkarlaneko lan-ingurunea sortzen du horrek, zentro teknologikoaren eskarmentuan babestuta.
Zentzu horretan, irtenbideak modu seguruan garatzen ditu hainbat lan; hala nola, pieza eta tresneria pisutsuak zamatzen eta deskargatzen ditu makina-erremintaren gainean, manipulazio-lanak egiten ditu muntaketan, trokelak aldatzen ditu edo paletizazio mota ezberdinak egiten. Bereziki, material arriskutsuak (produktu kimikoak, erradiaktiboak edo goriak) lekualdatu behar direnean.
Bestetik, "parking" edo aparkaleku-euskarria dauka garapenak, eta, horri esker, beso robotikoa erraz banandu daiteke zubi-garabitik, azken horrek modu askean lan egin ahal izan dezan. Trukaketa soil baten bidez eta beso robotiko berarekin, beso hori hainbat gunetatik ibil daiteke. Horri esker, hainbat prozesu kateatu daitezke, ekoizpen-kostuak eta -denborak murriztuz.
Muntaketa egin eta garapena abiarazi ondoren, IK4-TEKNIKERek eta JATORMANek elkarrekin garatu dute barne-mailako prestakuntza-prozedura, bai enpresa nafarreko langileentzat, bai etorkizuneko ezarpenetarako.