
Regulación y control de sistemas
En el área de regulación y control de sistemas se desarrollan soluciones de control avanzado para diferentes sistemas, con especial énfasis en sistemas mecatrónicos con requisitos exigentes en aspectos tales como la precisión, la rapidez/dinámica de la respuesta y el aseguramiento de la robustez en entornos industriales y/o agresivos.
TEKNIKER tiene amplia experiencia en el desarrollo de soluciones de control avanzado para sectores tales como:
- Máquina herramienta (control de vibraciones, eliminación de chatter, etc.),
- Energía (control de aerogeneradores, volantes de inercia, etc.),
- Equipamiento científico (telescopios, aceleradores de partículas, etc.),
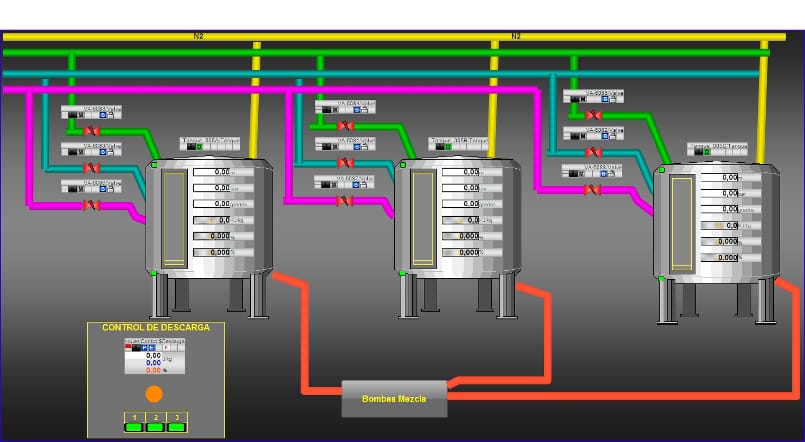
- Soluciones automatizadas para el control de procesos y plantas en general (industria química, plantas de almacenaje y paletización, etc.).
Existen amplias capacidades que incluyen tanto los fundamentos teóricos de las más novedosas técnicas de control (control robusto, predictivo, distribuido, etc.), así como la capacidad de implementar las soluciones adoptadas en campo/máquina de manera fiable y robusta. Los proyectos abordados se analizan desde un punto de vista holístico para aportar, además de la solución de control más apropiada, sugerencias de diseño y/o implementación de la propia planta (máquina, sistema) para lograr un comportamiento óptimo del binomio control-sistema físico.
Se dispone además de gran experiencia en la modelización y simulación de sistemas físicos, de manera que la síntesis de los controladores así como la estimación de su comportamiento se pueden realizar durante la fase de diseño de prototipos/sistemas. Plantas físicas modelizadas con un alto grado de fidelidad para el desarrollo de controladores incluyen todo tipo de sistemas mecatrónicos (máquinas-herramienta, sistemas láser, etc.), y aplicaciones energéticas (aerogeneradores y plantas termosolares).




